|
|
Connexion d'un prototype « robot sumo » et programmation du fonctionnementSuivre un protocole / respecter le matériel
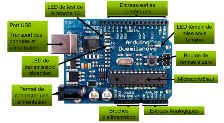
Carte Arduino UNO 25 € Servomoteur et ses engrenages intérieurs
18 €
|
| Un robot monté : carte Arduino et servomoteurs avec leurs fils | |
| Un câblage de fils fins équipé d'un clip pile et de tiges métalliques rigides rouges et noires | |
| 2 fils fins courts équipés de tiges métalliques rigides | |
| Un câble USB |
Suivre un protocole
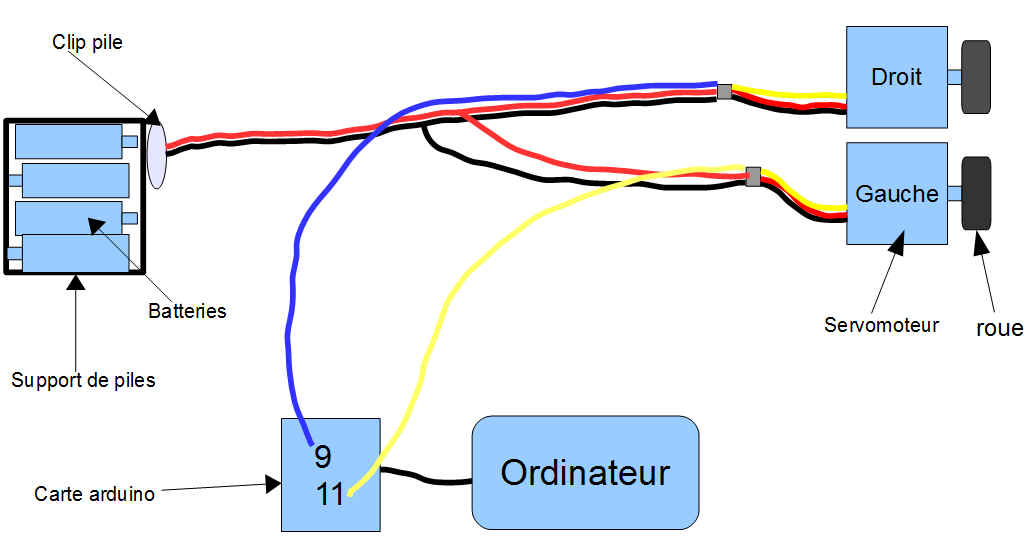
| Le fil rouge de chaque servomoteur est relié au câblage fil rouge (alimentation +) | |
| Le fil noir de chaque servomoteur est relié au câblage fil noir (alimentation-) |
VOIR LE SCHEMA DE MONTAGE CI-DESSOUS
b) Connecter les fils sur l'interface arduino
| Le fil rouge sur la borne 5v | |
| Le fil noir sur la borne GND | |
| Le servomoteur gauche est branché sur la broche numérique (digital) 9 : relier par un petit fil de liaison bleu le fil blanc du servomoteur à la broche 9 | |
| Le servomoteur droit est branché sur la broche numérique (digital) 11 : relier par un petit fil de liaison jaune le fil blanc du servomoteur à la broche 11 |
c) Appel du prof pour contrôle. Je vous fournirai les piles à ce moment-là
| Brancher le cable USB sur l'interface puis sur le PC | |
| Brancher le coupleurs de piles au clip piles, les servomoteurs doivent réagir |
1) Cliquer sur Techno301
2) Cliquer sur ![]()

| Menu Outils |
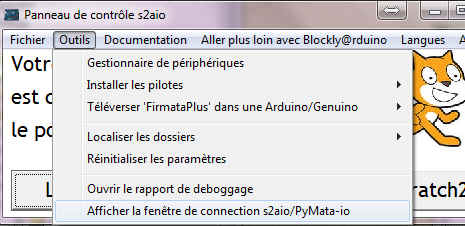
| Cliquer sur | |
|
Cliquer sur | |
|
Si tout se passe bien | |
|
Une fenêtre s'ouvre et le message ci-dessous apparaît | |
|
|

|
La del
qui était éteinte, | |
|
SURTOUT, ne pas fermer cette
fenêtre mais la réduire en cliquant sur |
| Lancer le logiciel scratch en cliquant sur | |
|
La fenêtre ci-dessous doit s'ouvrir avec les 2 arduino
|
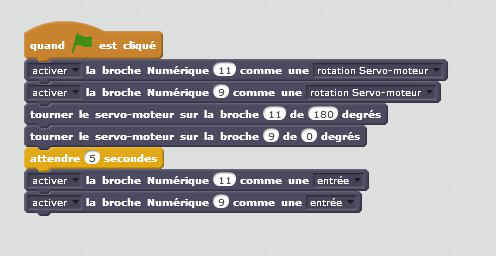
| Les servomoteurs doivent se mettre en marche durant 5 s ; noter le sens de rotation (avance ou recule) |
| Remplacer 0 par 180 et inversement pour l'autre servomoteur | |
| Sur feuille de classeur recopier et compléter le tableau ci-dessous | |
| Remplacer 0 par 90 pour les 2 servomoteurs |
|
Point mort |
Avance |
Recule |
|
|
Servomoteur droit |
90° |
||
|
Servomoteur gauche |
90° |
|
Menu Fichier, Enregistrer sous | |
|
Double cliquer sur P: | |
Naviguer jusqu'à atteindre : Travail\Matieres\Techno\S4 | |
|
Enregistrer votre fichier sous le nom fonctionnement1 |
| Vous allez dans un 1° temps piloter votre robot à l'aide du clavier (touche vers le haut, bas, droite et gauche). | |
| Nous utiliserons ensuite un logiciel qui substituera le joystick au clavier |
a) Rectifier le programme de façon à :
| Si la flèche bas est appuyée, le robot recule | |
Vous aurez besoin d'utiliser la
condition 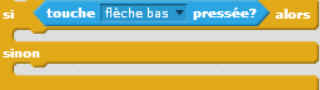 | |
| Vous aurez également besoin d'utiliser
l'instruction |
c) Le tester
d) L'enregistrer
e) Compléter le tableau ci-dessous sur votre feuille de classeur puis, terminer le programme de façon à ce que le robot puisse avancer, reculer et tourner à droite et à gauche : pour cela, il faudra rajouter 3 conditions. Chaque nouvelle condition est ajoutée dans le sinon
|
Tourne à droite |
Tourne à gauche |
|
|
Servomoteur droit |
Valeur en degrés : ............. | ........................... |
|
Servomoteur gauche |
................... | ................... |
f) Me le montrer après l'avoir testé
g) L'enregistrer
a) Branchement du joystick
Brancher le joystick sur le port USB de l'ordinateur
b) Lancement du logiciel
| Cliquer sur Techno301 | |
Cliquer sur  |
c) Paramétrage de ControlIMK
| Cliquer sur la petite flèche de |

| Sélectionner | |
| Cliquer sur | |
| Cliquer sur la petite flèche de Active controllers |

| Sélectionner | |
| Vous devez obtenir : |
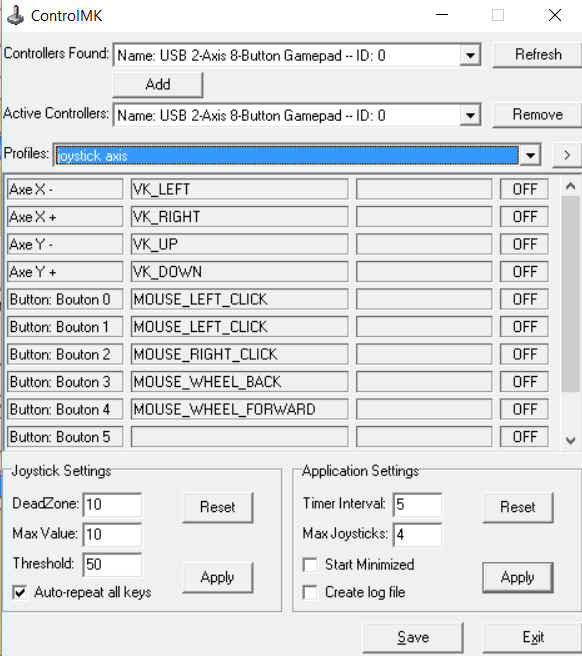
|
Réduire en cliquant sur le - mais surtout ne pas fermer | |
Tester votre programme pilotant avec le joystick |
Un système automatique réalise une suite d'opérations pour accomplir une tâche. Il peut être représenté graphiquement sous la forme d'un organigramme.
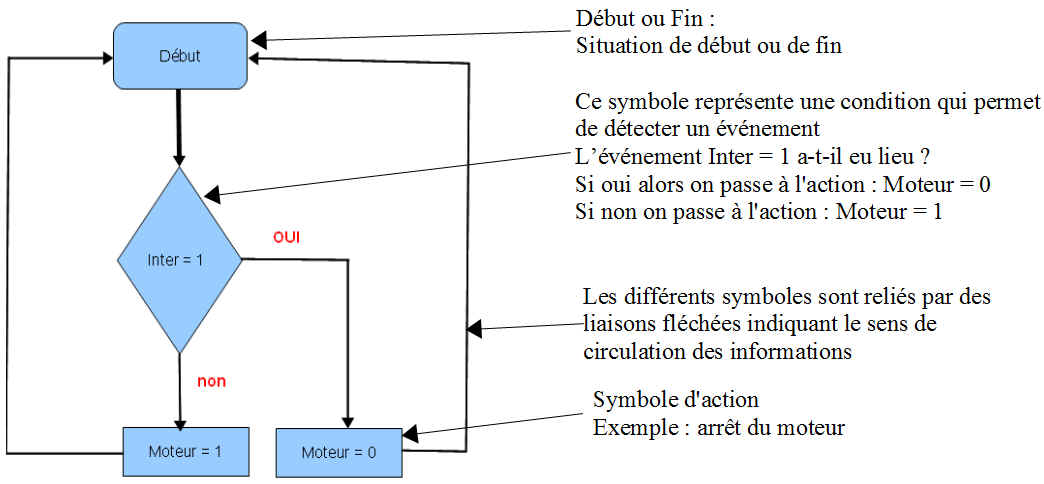
a) Recopier et compléter l'organigramme dans le cas où on appuie sur le bouton gauche du joystick
b) Terminer l'organigramme pour piloter le robot dans toutes les directions

|
Quitter Scratch | |
|
Fermer la fenêtre s2aio | |
|
Débrancher le cordon USB | |
|
Débrancher les piles et me les rendre en main propre | |
|
Ranger le matériel comme vous l'avez trouvé au départ |
| 1 joystick fabriqué en interne |
Quand je clique sur le drapeau vert :
| Activer la broche numérique 8 comme une entrée | |||||
| Répéter indéfiniment | |||||
| Si l'interrupteur est actionné : | |||||
Alors :
| |||||
Sinon :
|
|
Brancher le - de la del (borne noire) sur masse | |
|
Brancher le + de la del (borne rouge) sur 13 | |
|
Brancher le fil jaune de l' interrupteur sur le pin 8 | |
| Brancher le fil rouge de l'interrupteur sur 5v de l'interface |
|
Vous aurez besoin d'utiliser | |
Si vous avez besoin d'aide, cliquer ici (Aide pour les 4° à adapter) | |
Enregistrer votre fichier sous le nom fonctionnement-inter2 |
| Ce joystick implanté sur les pins analogiques A3 et A4 modifiera complètement la programmation précédente faite avec les flèches | |
| Par contre le départ avec del et interrupteur est toujours valable |
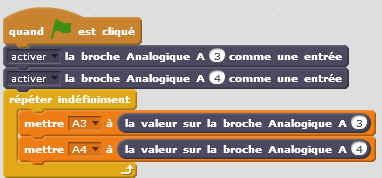
Quand je clique sur le drapeau vert :
| Activer la broche numérique 8 comme une entrée | |||||||||||||||||||||||||||||||||||||||||||
| Activer la broche analogique A3 comme une Entrée | |||||||||||||||||||||||||||||||||||||||||||
| Activer la broche analogique A4 comme une Entrée | |||||||||||||||||||||||||||||||||||||||||||
| Répéter indéfiniment | |||||||||||||||||||||||||||||||||||||||||||
| Si l'interrupteur est actionné : | |||||||||||||||||||||||||||||||||||||||||||
Alors :
| |||||||||||||||||||||||||||||||||||||||||||
Sinon :
|
|
Brancher le fil vert du joystick sur le pin A3 | |
| Brancher le fil bleu sur le pin A4 | |
| Brancher la masse(-) sur une des bornes GND | |
| Brancher le fil rouge sur la borne 5v de l'interface |
Il faut faire afficher les valeurs des broches analogiques A3et A4. Pour cela :
Dans | |
Créer une variable que vous appelerez A4 |
b) Visualiser les valeurs
|
Faire glisser | |
|
Dans | |
|
Taper 3 à la place de PIN | |
|
Faire glisser à la place du 0 | |
|
Procéder de même pour A4 | |
|
Les mettre au début du programme |
|
Tester : quand vous bougez le joystick, les valeurs lues à droite de l'écran changent |

| Intégrer les variables | |
| Au lieu de porter sur les flèches, les tests se font maintenant sur les variables A3 et A4 | |
| Enregistrer votre fichier sous le nom fonctionnement-inter2 | |
| Quand il fonctionne me le montrer |