|
|
1 Assemblage des différentes piècesIl est maintenant temps de positionner tous les éléments sur le châssis, si votre camarade a terminé la conception. Nous terminerons son dessin plus tard Méthodologie :
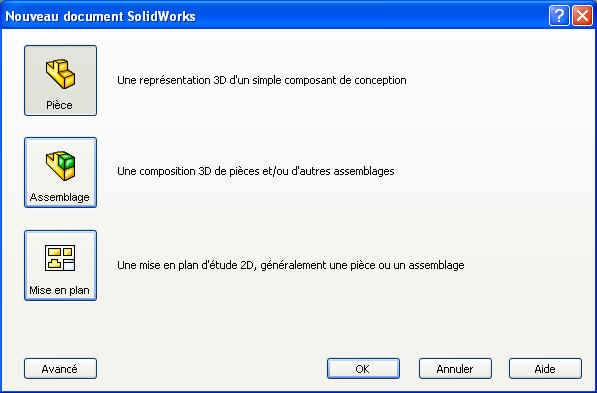
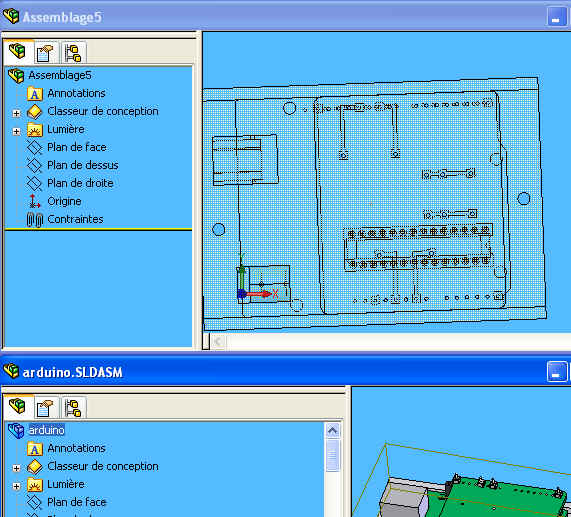
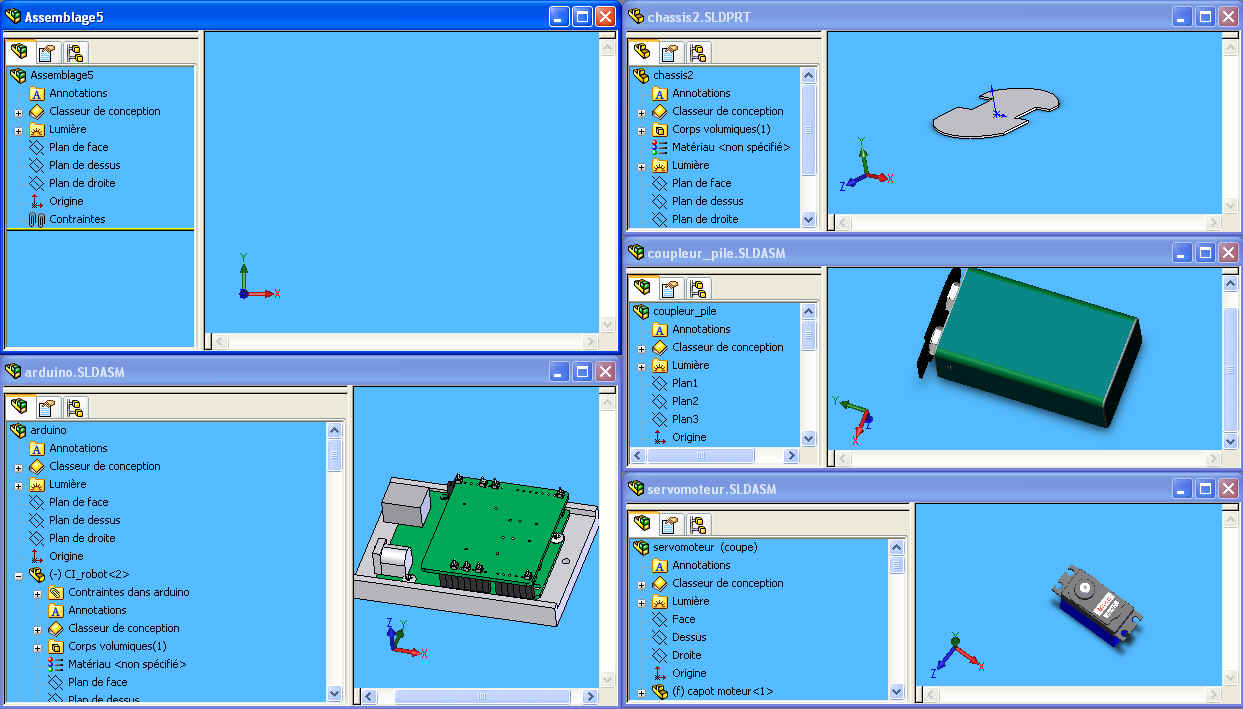
1.1 Création d'un document d'assemblagea) Ouvrir tous les fichiers
Cliquer ici sur Didacticiel b) Création
1.2 AssemblageCliquer ici sur Didacticiel
1.3 Enregistrement
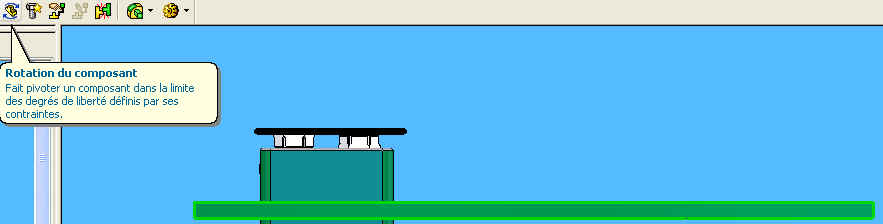
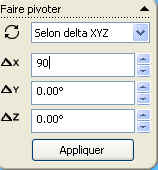
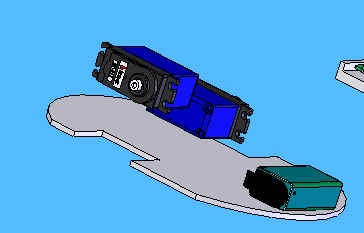
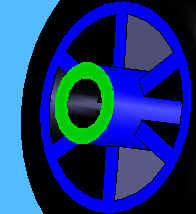
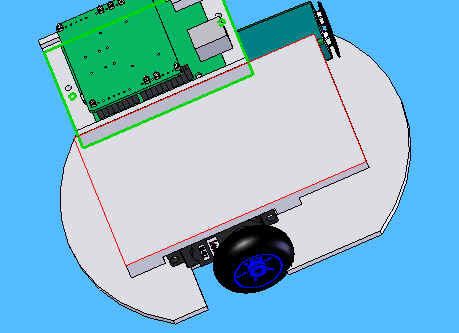
1.4 Rotation des composants
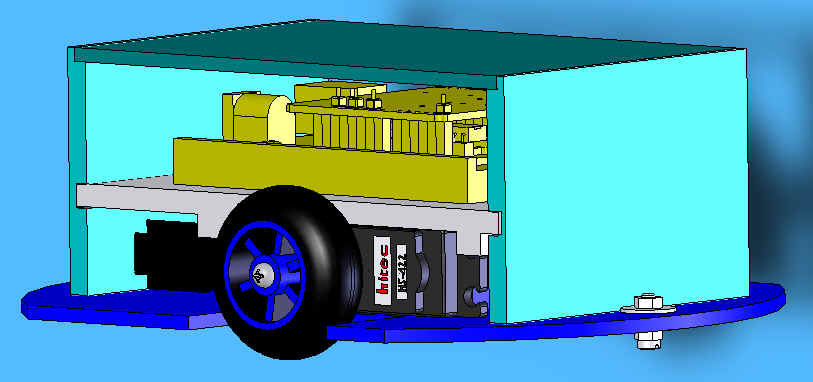
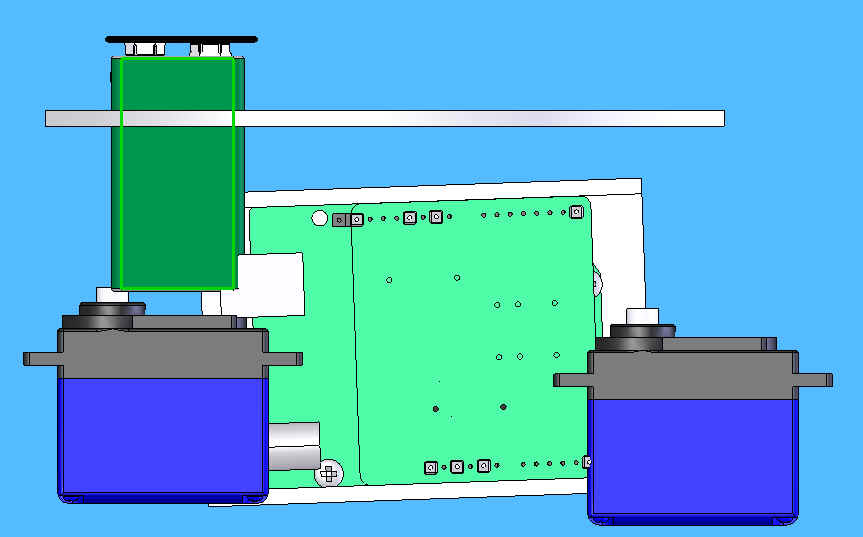
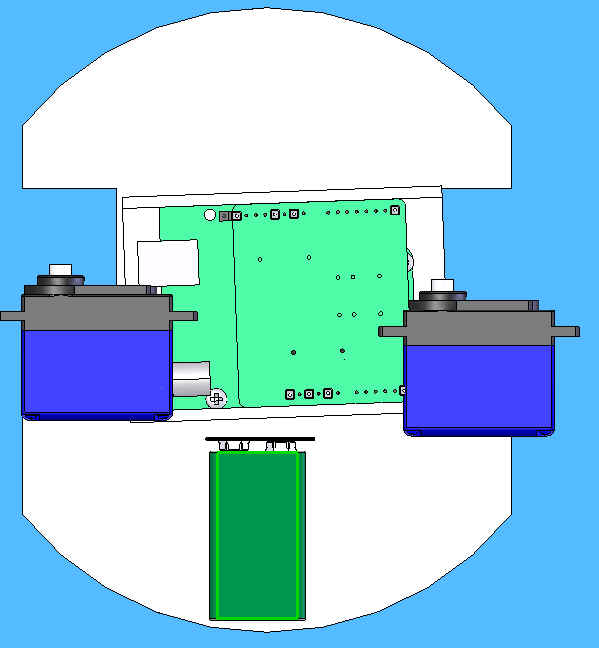
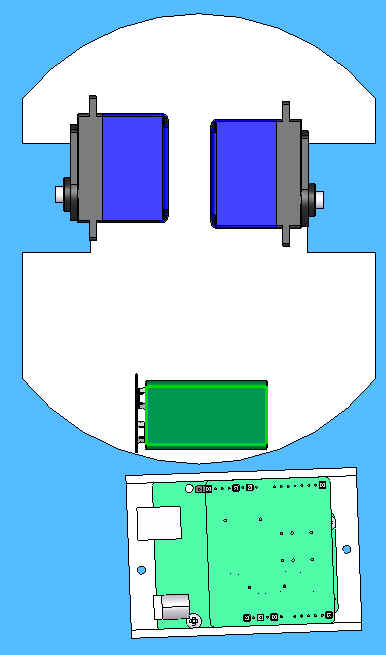
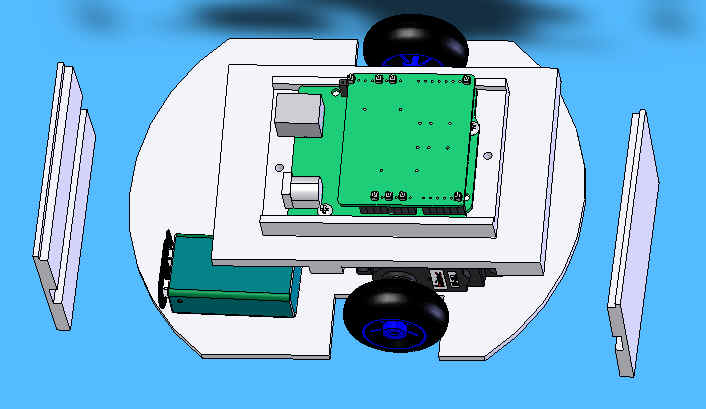
Résultat :
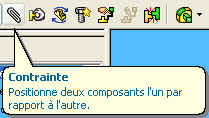
1.5 ContraintesCliquer ici sur Didacticiel Cette partie est très difficile. Donc, si vous rencontrez des problèmes, ne pas hésiter à m'appeler
Par contre, on ne sait pas la position exacte des roues, donc, nous allons faire un nouvel assemblage 2 Colorier les pièces2.1 Sélectionner la pièce
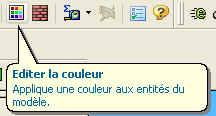
2.2 Cliquer sur Editer la couleur
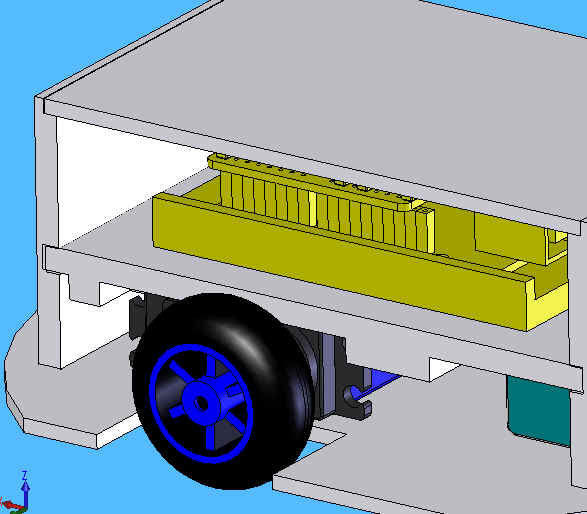
2.3 Procéder de même pour les autres pièces3 Assemblage des roues (fait)En principe si vous avez pris l'assemblage servomoteur+roue, ce travail a déjà été fait a) Ouvrir tous les fichiers
b) Assemblage
c) Contraintesn°1 : coaxialité
Procéder de même pour la 2° roue 4 Rendre invisibles certaines parties du robot
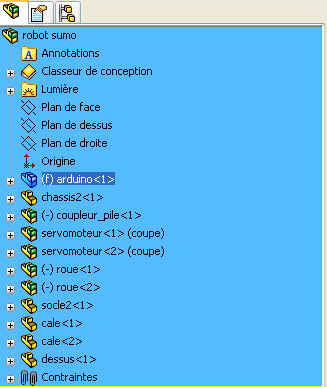
'Cacher les piècesDans l'arbre de création : a) Réduire l'arborescence des différetes parties, en cliquant sur les -
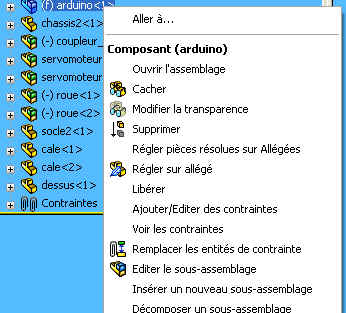
b) Sélectuionner Arduino, puis faire un clic droit
c) Dans le menu contextuel, cliquer sur Cacher
Résultat : la pièce disparaît et dans l'arbre de création, apparaît transparente Procéder de même pour la pile 5 Assemblage du supportATTENTION : il est bien évident qu'avant de l'assembler, le support ou la pièce que vous souhaitez assembler a été réalisée Si vous avez des problèmes ne pas hésiter à m'appeler car cette partie est vraiment difficile 1 Ouvrir les 2 fichiers2 Faire glisser Support dans robot_sumo3 Faire tourner4 Contraintes4.1 Socle - Supporta) plan
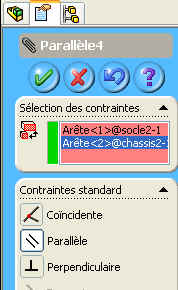
b) Parallèle
c
|
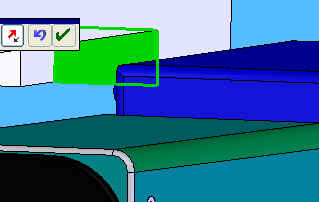
| Il peut encore bouger en longueur mais nous verrons plus tard après avoir rajouté les cales |


| Il peut encore bouger en longueur mais nous verrons plus tard après avoir rajouté les cales et créé les encastrements |
Si vous avez des problèmes ne pas hésiter à m'appeler car cette partie est vraiment difficile
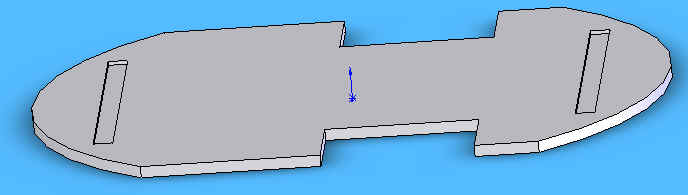
Le chassis n'est pas terminé, et à ce stade, il convient de le faire
| La modifier en rajoutant les 2 encoches comme ci-dessous |
Cliquer ici sur le didacticiel
| Sélectionner l'esquisse puis | |
| Créer un enlèvement de matière en cliquant cette fois
sur | |
| Enlever 1 mm |

| Quand vous reprenez le fichier d'assemblage robot_sumo, solidworhs vous indique le message suivant |
| C'est normal : vous avez modifié une pièce et solidworks vous demande de modifier cette pièce dans l'assemblage | |
| Surtout répondre OUI |
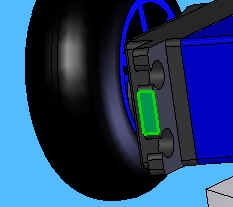
a) plan
b) Positionnée en longueur
c) Positionnée en largeur
d) Procéder de même pour la 2° cale
Ainsi les 2 seront fixées
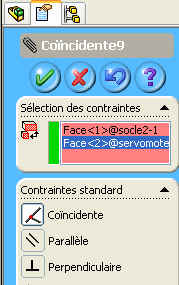
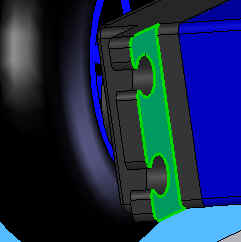
a) plan : extremité arduino - fond d'une encoche
b) Positionnée en largeur : arête extérieure arduino - arête extérieure encoche
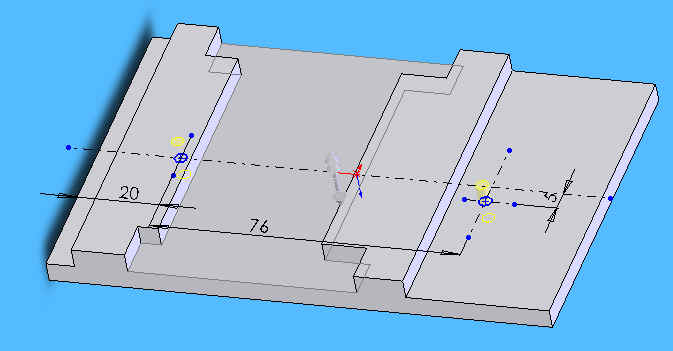
a) Rajouter une nouvelle esquisse
| Ajouter les axes des trous et les côtes |
b) Percer les trous
| Sélectionner votre esquisse puis Enlèvement matière extrudée | |
| Cocher comme ci-dessous |

c) Enregistrer
d) Fermer et mettre à jour le document d'assemblage
Dans l'arbre de création :
a) Réduire l'arborescence des différetes parties, en cliquant sur les -
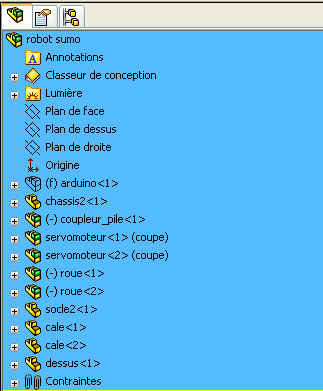
b) Sélectuionner Arduino, puis faire un clic droit

c) Dans le menu contextuel, cliquer sur Montrer
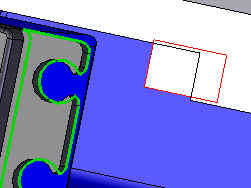
Le positionnement va se faire par rapport aux trous
| Le positionnement se fait par rapport au plan. | |
| Par contre, elle peut toujours bouger car dans la
réalité, elle ne sera pas fixée
|
| Le positionnement va se faire par rapport aux arètes de dessous | |
| Le positionnement latéral |
| Dans visserie | |
| Vis 2,9 x 9,5.sldprt | |
| rondelle-D3.sldprt | |
| Vis bois 3x9.sldprt | |
| Vis M3x10.sldprt | |
| Vis M3x15.sldprt | |
| Ecrou M3.sldprt |
| Vis 2,9 x 9,5 : 2 | |
| rondelle-D3 : 2 | |
| Vis bois 3x9 : 4 | |
| Vis M3x10 : 1 | |
| Vis M3x15 : 2 | |
| Ecrou M3 : 4 |
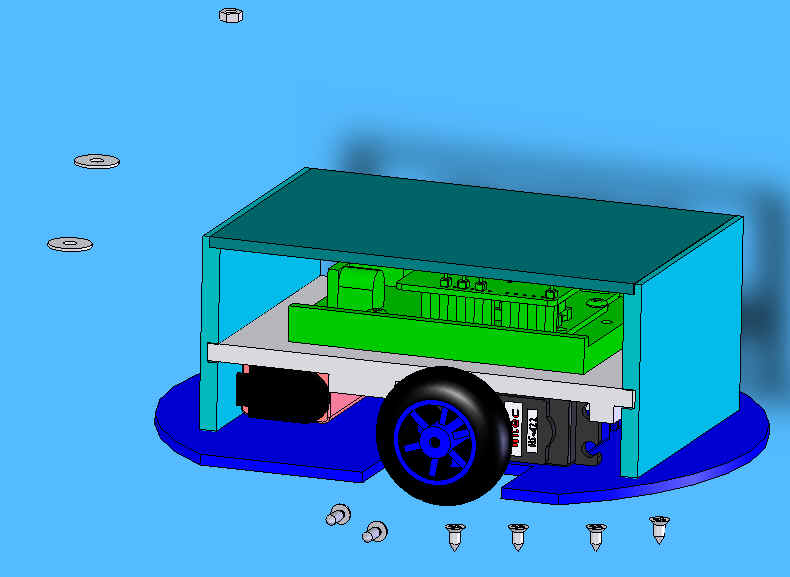
Ne pas hésiter à cacher des pièces pour faciliter l'assemblage